Kynetics @ Embedded World Conference – 2019

Kynetics will be attending Embedded World 2019 in Nuremberg, Germany on February 26 to February 28, 2019.
Check out our latest Android BSP developments on the Toradex Colibri and Apalis family product lines including the iMX8 QM, by visiting the Toradex booth. We are also showcasing our Real-Time Android featuring Asymmetric Multiprocessing on the iMX7D. If you’re interested to our Android Real Time on the new iMX7 ULP, visit the NXP booth.
At the NXP booth we are also supporting the launch of the new Nitrogen 8 featuring the iMX8 Mini, by Boundary Devices.
If you would like to connect with our team at the show, Contact Us
OrangePi Zero Plus 2 H3 Support in mainline Linux Kernel

Kynetics has developed and upstreamed support for the OrangePi Zero Plus 2 H3 board in the Linux kernel. Starting with the Linux kernel v4.20 device tree, sun8i-h3-orangepi-zero-plus2.dts is included in the stable tree to support the board.
You can find the patches at Kernel.org.
Kynetics @ EclipseCon Europe 2018


Kynetics Patches for SWUpdate Merged in Mainline

As a contributor to the Open-Source community and member of the Eclipse Foundation, Kynetics’ patches for SWUpdate have been merged with the mainline SWUpdate code on GitHub!
Patches allow SWUpdate’s hawkBit Linux client to support target token and gateway token, improving the authentication of the client device.
Refer to Update Factory documentation to learn more about target and gateway tokens.
Webinar – Heterogeneous Multiprocessing with Android on NXP i.MX 7
This webinar presents a technical overview on asymmetric multiprocessing and its implementation on an NXP i.MX 7 Colibri SoM running Android on the Cortex-A (master core) and FreeRTOS on the Cortex-M (real-time core).
Key takeaways:
- Understand Asynchronous Multicore concepts
- Learn what’s required to port the Android Kernel and RPMsg driver to the Colibri iMX7
- See how to setup and program the Cortex-M4 microcontroller core
- Experience a hands-on demo which brings together Android, FreeRTOS, RPMsg, IPC, Java, JNI
Kynetics’ own Nicola La Gloria and Laura Nao will each be speaking at different times of the day to accommodate different schedules.
If you would like to learn more or register for this webinar, see the Toradex Event Page!
Update 06/15/18: below you’ll find the webinar:
Technical Notes Goes Live!
Kynetics is now offering technical notes regarding some of our work to both help our customers get up to speed and provide insights to the broader open-source community. Topics range from detailed technical examples or demos, troubleshooting guides, getting started guides and general HOWTO documents.
We hope that our customers, peers and the broader open-source community find these documents as useful as we do!
Read more: Kynetics Technical Notes.
Kynetics joins Toradex Partner Network
We are happy to announce that Kynetics recently joined the Toradex Partner Network. Over the past 18 months, we have been actively providing quality, customized embedded software services to a number of our customers who utilize the Apalis and Colibri families which include i.MX6 and i.MX7 NXP SoCs.
In addition we’ve also been contributing back to the Toradex community, offering detailed documentation and also binary images of Android 7 (Nougat) for some of the Colibri family SoCs. You can learn more over at: Kynetics Technical Notes. Here are the direct links:
Android Nougat for Toradex Colibri iMX6DL
Android Nougat for Toradex Colibri iMX7D
Android Asymmetric Multiprocessing on Toradex Colibri i.MX7D
Update Factory Clients for Embedded Android
We have updated the documentation on how to install and configure our Android client service and user interface app for Update Factory.
To learn more:
Kynetics joins Eclipse IoT Working Group
We are proud to announce that Kynetics is now a member of the Eclipse IoT Working Group! This collaboration focuses on the development, promotion and adoption of open source IoT technology.
Kynetics joins the Eclipse Foundation
We are proud to announce that Kynetics is now a Member of the Eclipse Foundation! At Kynetics, we honor the contribution to open-source because we recognize the value of community driven collaboration and software. Joining this great team of individuals and companies is an opportunity for Kynetics to contribute actively in companionship with great industry leaders.
We look forward to the next chapter!
Nicola La Gloria, Ph.D, CEO, Kynetics
Kynetics @ Eclipse IoT Day Santa Clara

Kynetics’ Nicola La Gloria will be speaking @ the Eclipse IoT Day conference in Santa Clara, CA on Mon 05/14/2018 @ 11:10AM – Santa Clara Convention Center. The session is Remote software updates for IoT devices with Eclipse hawkBit.
Update 05/30/18: below you’ll find the presentation from the session @ IoT Day by Nicola La Gloria:
Kynetics @ ELC and OpenIOT Summit 2018

Kynetics will be presenting at the Embedded Linux Conference and OpenIOT Summit 2018 in Portland, Oregon – March 12-14.
We will be covering the following topics:
Remote Software Updates for IoT Devices with Eclipse hawkBit
In the past embedded software updates have often been based on custom software, but now several open source frameworks are emerging as community based software components to build configurable, scalable and robust update platforms.
This talk will show how to build a remote software update management platform to transparently manage a heterogeneous set of devices (embedded Linux and Android).
For the remote software update management platform the Eclipse hawkBit software will be presented, showing its architecture, security model and use cases.
For the IoT device hawkBit client two heterogeneous solutions will be presented: a SWUpdate based Linux client and an open source DDI service Android app. The SWUpdate Linux client will be configured in a two phase Android-style approach separating the installation of the update files in a single purpose recovery OS. Presented by Diego Rondini.
More info can be found here.
An Introduction to Asymmetric Multiprocessing: When this Architecture can be a Game Changer and How to Survive It
Asymmetric multi-processing (AMP) systems fulfill the need for high performance and real-time by combining the responsiveness of a MCU with the processing power of an application processor which runs a full OS.
This talk will present a technical overview on asymmetric multiprocessing platforms focussing on motivations, use cases and how to handle interprocess communication between MCU and MPU in practice.
Tools and strategies on how to develop software on such platforms will be presented, as well as debugging techniques which take into account the diversity and complexity of such systems. A case of study based an AMP architecture is analyzed. Low-latency tasks such as high-rate reading/sampling can be handled more easily and efficiently by the MCU core running a RTOS while data visualization can displayed by the Master core running a full Linux operating system. Presented by Nicola La Gloria and Laura Nao.
More info can be found here.
Kynetics @ CES 2018
Kynetics will be attending CES 2018 in Las Vegas, NV, Jan 8-11 in support of our partners and customers! If you would like to connect with us during the event, Contact Us.
Case study @ eclipse.org
Kynetics was featured in a case study about IoT and the use of open source technologies, written by The Eclipse Foundation. The article can be found here.
Kynetics @ ELC Europe 2017

Kynetics will be speaking at the Embedded Linux Conference – Europe 2017 in Prague, Czech Republic on Tuesday 10/24/2017. The session is: Orchestrated Android-Style System Upgrades for Embedded Linux.
Update 10/31/17: below you’ll find the presentation from ELC 2017 by Diego Rondini:
We will be holding a technical showcase of Warp. Contact Us for more information!
Download a copy of the above ELC Europe 2017 technical information here
Kynetics @ Linaro Connect 2017
Kynetics will be speaking @ Linaro Connect in San Francisco on Thursday 09/28/2017 @ 12:00PM. The session is: Update Remotely IoT Devices using Eclipse Hawkbit and SWUpdate.
You can view or download a copy of the presentation here.
Kynetics @ EclipseCon Europe 2017
Kynetics will be speaking @ EclipseCon Europe – 2017 in Ludwigsburg, Germany on Tuesday, 10/24/2017. The session is: Update Remotely Embedded Devices using Eclipse hawkBit and SWUpdate.
Kynetics @ JavaOne 2017

Kynetics will be speaking @ Oracle JavaOne 2017 conference in San Francisco, Oct 1-5. The session is: Remotely Update Java IoT Devices with Eclipse hawkBit and SWUpdate [CON6435].
A20 OLinuXIno LIME2 – eMMC support in meta-sunxi OpenEmbedded

Kynetics has developed and upstreamed support in the meta-sunxi OpenEmbedded layer for the Olimex A20 OLinuXIno LIME2 eMMC, the first Olimex board based on the Allwinner A20 SOC to feature eMMC storage. In particular, the patches add support for the eMMC in U-Boot and the Linux kernel including automatic selection of boot partitions based on the storage which U-Boot has been loaded from.
You can find the patches on Github.
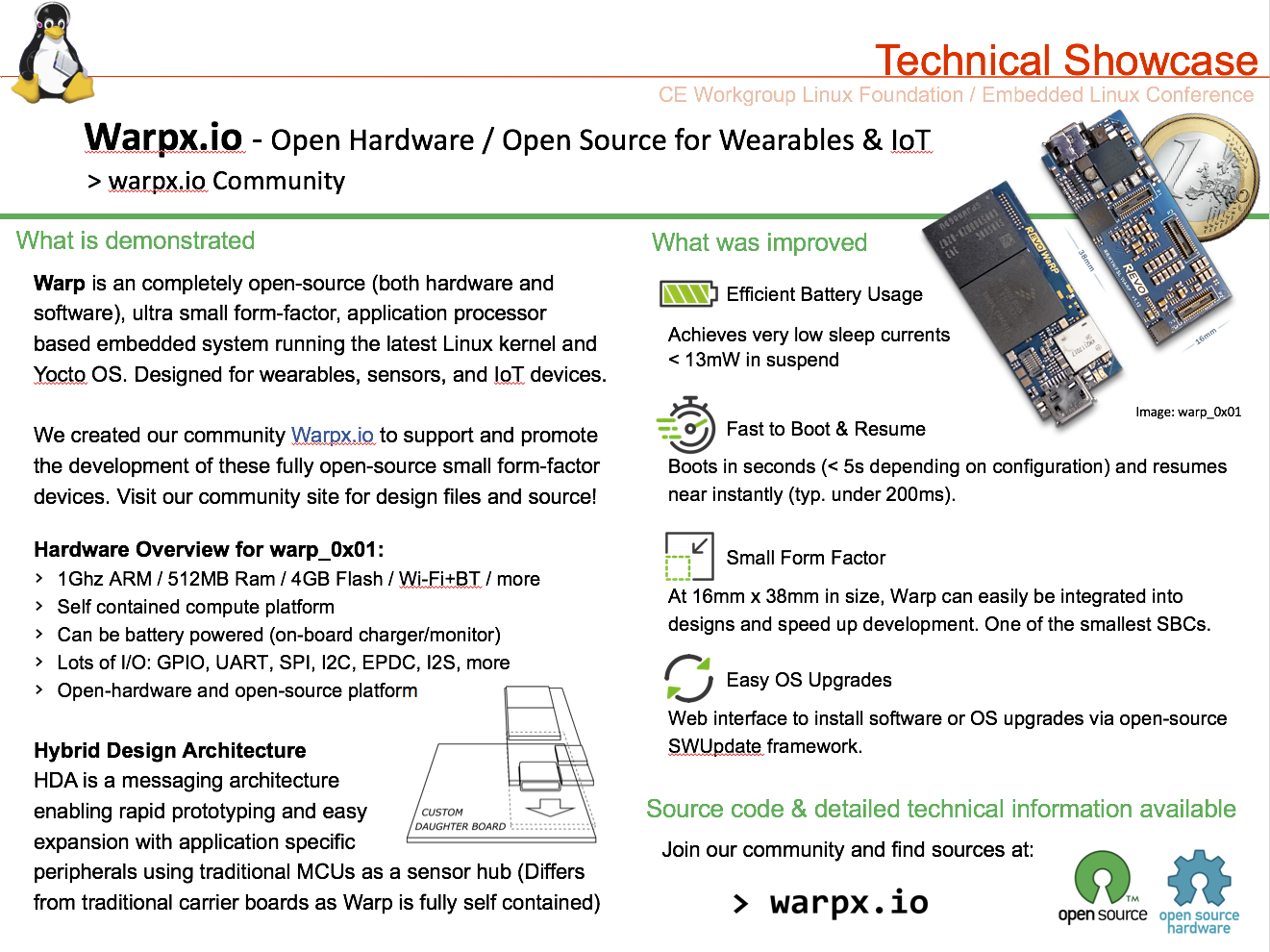
WaRP – Easy OS upgrades with SWUpdate

Kynetics has prepared and documented a method to update the warp_0x01 ultra small form factor embedded system in a secure and efficient way using SWUpdate. See the full post over at the Warpx Community.
Kynetics @ ELC 2017
Kynetics will be attending the Embedded Linux Conference 2017 in Portland, Oregon – February 21-23. We will have Warpx on display at the show! See below for more information about Warpx and visit the Warpx community over at warpx.io.
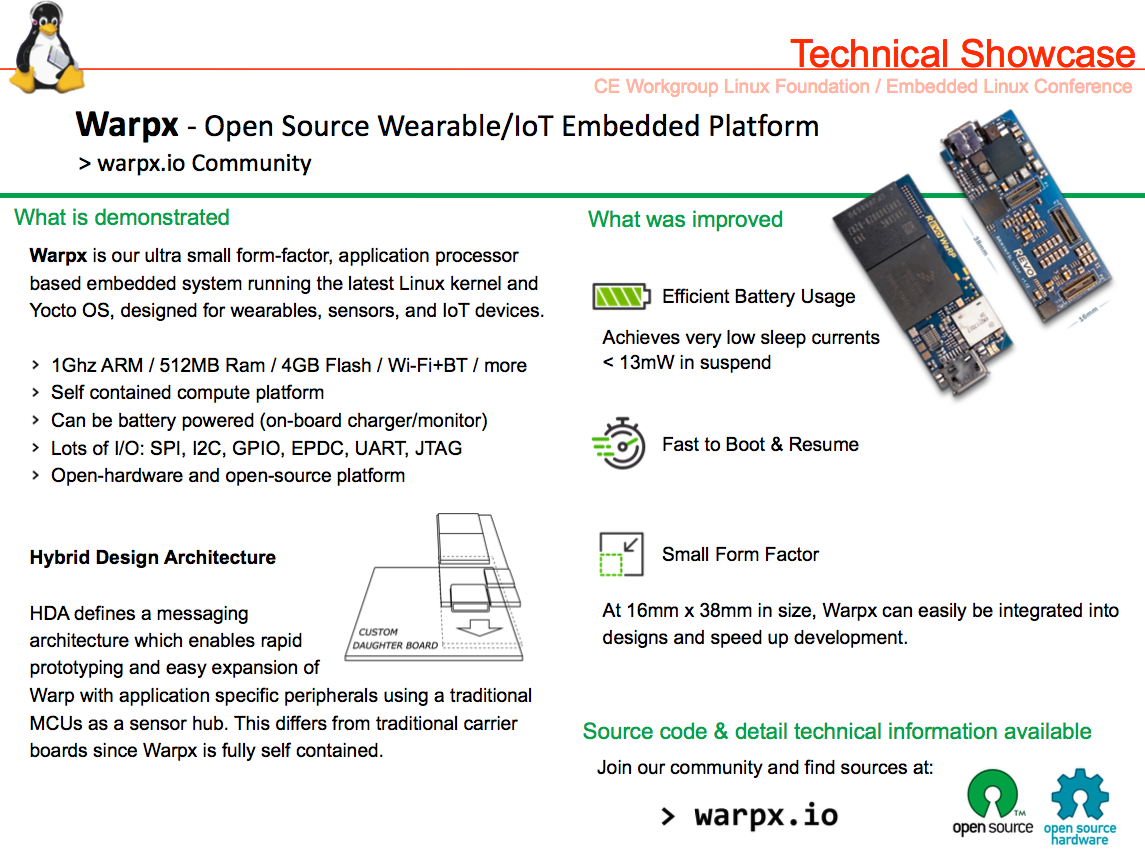
Warpx – Open Source Wearable/IoT Embedded Platform
Download a copy of the above ELC 2017 technical information here.
Kynetics @ CES 2017
Kynetics will be attending CES 2017 in Las Vegas, NV, Jan 5-8 in support of our partners and customers! If you would like to connect with us during the event, Contact Us.
Kynetics @ JavaOne 2016
Kynetics will be speaking @ Oracle JavaOne 2016 conference in San Francisco on Wed 09/21/2016 @ 11:30AM – Hilton Golden Gate 4/5. The session is Reactive IoT: Build an IoT Back End with the Actor-Based Model [CON6193]
Download the presentation here.
See WaRP @ Wearables Techcon 2016!
Kynetics and REVO will be attending the Wearables Techcon 2016 show in San Jose, CA, July 18-20. The team will be presenting WaRP – an Open Source reference design for Wearable technology. WaRP is open BOM, open schematics and all software engineered and developed by the team is available on Github in support of your next rapid prototype!
Interested in WaRP? Learn more at: www.warpx.io.
WaRP @ JavaOne 2015
Kynetics and REVO will be speaking @ Oracle JavaOne 2015 conference in San Francisco on Wed 10/28/2015 @ 11:30AM – Hilton Continental Ballroom 7/8/9. The session is Deploy Small IoT Embedded SOC Devices and a Back-End Platform with Java, Using WaRP [CON10282]
Download the presentation here.